Je voulais trouver une solution qui m’évite de me déplacer jusqu’à la porte à chaque fois que mon chat veut entrer ou sortir. L’option la plus évidente — installer une chatière — est impossible car les seuls accès vers l’extérieur sont des portes-fenêtres vitrées, qu’il est hors de question de percer (même si apparemment, c’est techniquement possible). Idem pour les murs en béton autour.
Du coup, il n’y a pas 36 solutions : motoriser la porte elle-même. Pour cela, il faut 2 actions mécaniques distinctes :
- Tourner la poignée
- Tirer ou pousser la porte
C’est parti.
Tourner la poignée
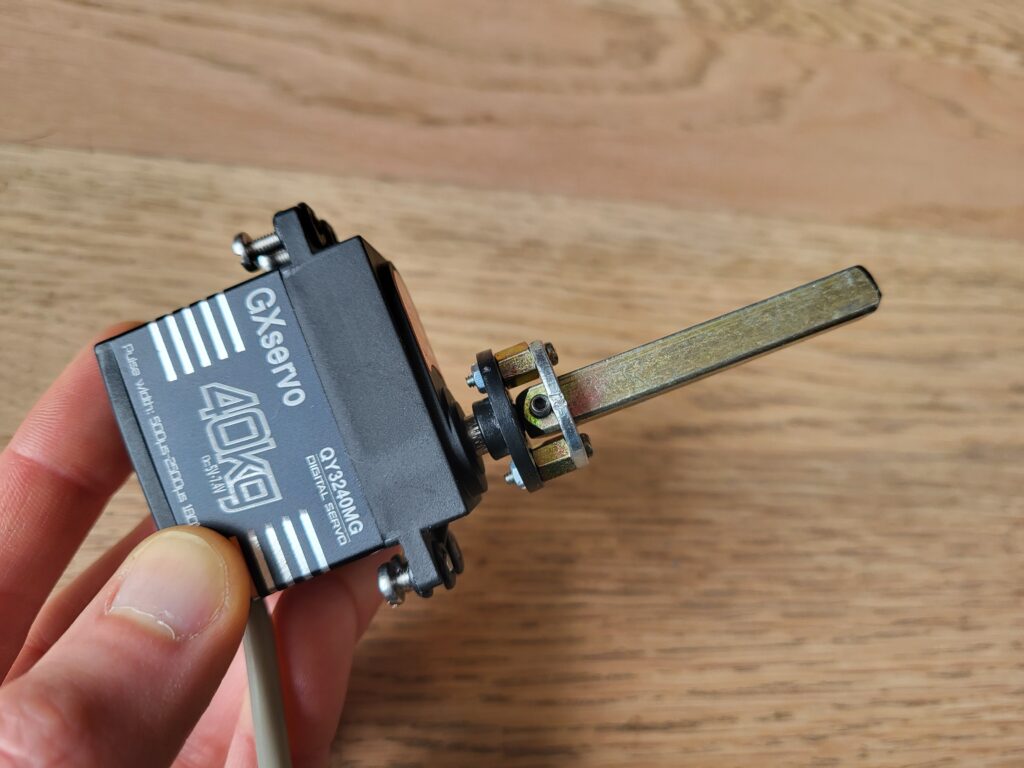
Je remplace la poignée d’origine par un servomoteur de modélisme. Pour avoir une estimation du couple nécessaire, je la manœuvre manuellement à travers un pèse-valise pour mesurer l’effort nécessaire. Sachant que le bras de levier mesure 10 cm et que la balance indique 4 kg, le couple nécessaire est l’environ 4 Nm, ou 40 kgf.cm (plutôt noté « 40 kg » sur les fiches techniques chinoises).
Il reste à démonter la poignée (2 vis) et à créer un système permettant d’accoupler le servomoteur avec la serrure (tige carrée standard) :


Pour cela, je fixe sur le palonnier d’origine une rondelle dont j’ai rendu le trou carré, pour empêcher la tige carrée de tourner. Pour l’empêcher de sortir, je l’ai bloquée derrière la rondelle avec une goupille. J’ai laissé pas mal de jeu ce qui procure un petit effet « rotule » qui tolère les légers désalignements. Je voulais éviter un assemblage hyperstatique qui engendrerait des efforts inutiles sur le servo et/ou la serrure :


Ensuite, une pièce imprimée en 3D vient maintenir le servo à la place de la poignée :

Résultat :

J’en ai profité pour remplacer le câble par un plus long et de plus grosse section (lorsque le servo force, il consomme plus de 3A).
Tirer ou pousser la porte (premier essai)
Pour déplacer la porte, j’ai d’abord fabriqué un chariot motorisé avec un moteur pas-à-pas dont l’axe dépasse de chaque côté, pour fixer chaque roue :

Le chariot est maintenu sur la porte avec des aimants :

C’est un échec cuisant. Même lesté, les roues n’ont pas du tout assez d’adhérence pour déplacer la porte.
Tirer ou pousser la porte (second essai)
Je dégotte un vérin 12V. Lui au moins n’aura pas de problème pour déplacer la porte. C’est même l’inverse : vu l’effort qu’il est capable de fournir, s’il se met à pousser alors que la poignée est encore verrouillée, il ferait des dégâts. L’objectif n’est pas non plus le couper le chat en deux si la porte se referme sur lui.
Le risque étant très grand, je veux une limitation d’effort fiable à 100%. Je refuse de compter sur une mesure du courant du vérin, qui pourrait tomber en panne. Plutôt, le mouvement sera transmis à travers des aimants. Si quelque chose résiste trop, les aimants vont tout simplement se désolidariser :

Si le vérin essaie de tirer la porte alors que quelque chose l’empêche de se fermer, les aimants au niveau de 1 vont se dissocier (la tige du vérin va continuer de se rétracter en laissant la porte en place).
Si à l’inverse il essaie de pousser et que la porte résiste, c’est au niveau de 2 que la séparation se fera : tout le bloc vérin se désolidarisera de sa fixation sur la terrasse et glissera dessus vers la droite.
Pour fixer le vérin à la terrasse, une vis est simplement glissée entre deux lames :

Comme le servo est à l’intérieur et le vérin à l’extérieur, il faut faire passer des câbles à travers la porte. J’utilise une nappe qui passe sans problème malgré le joint :

Pour contrôler le tout, je monte sur un bout de Veroboard un ESP8266, un récepteur 433 MHz (pour la télécommande), un régulateur 5V et un pont en H à deux relais :
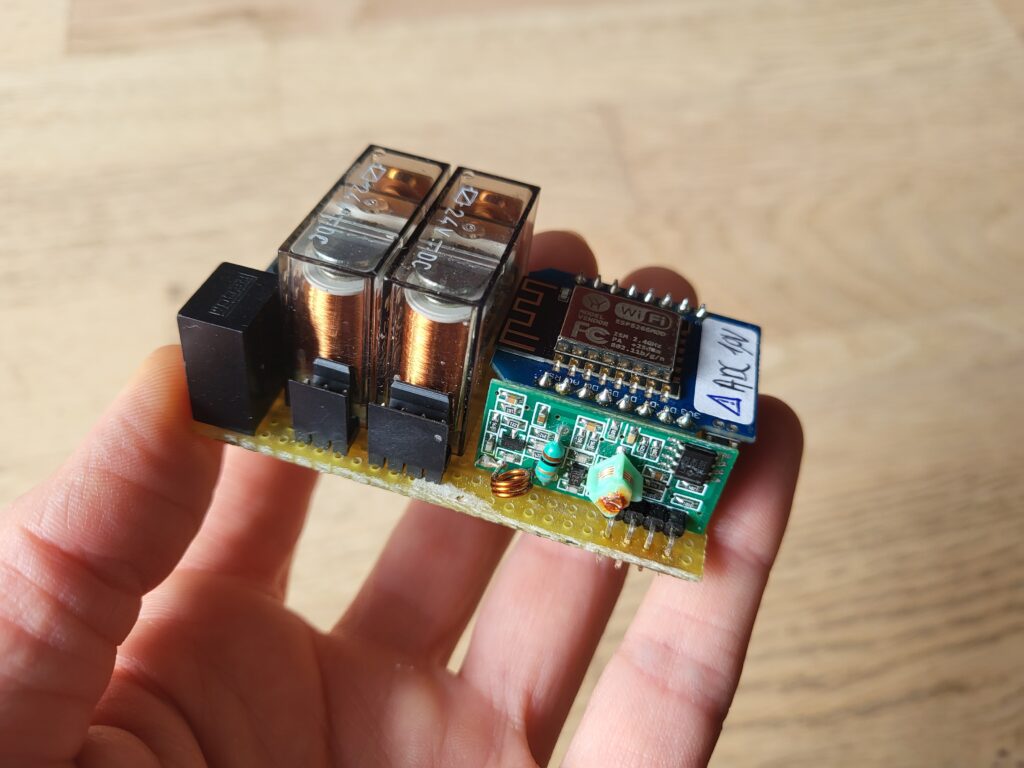
Le tout est alimenté par une alim secteur 12V :

Résultat : ça fonctionne !
Seul problème : l’adhésif qui relie le vérin à la porte ne tient jamais très longtemps. De plus, le positionnement du vérin n’est pas optimal : il faudrait mieux que la porte soit tirée ou poussée à peu près en son centre, au niveau de la poignée.
Tirer ou pousser la porte (troisième essai)
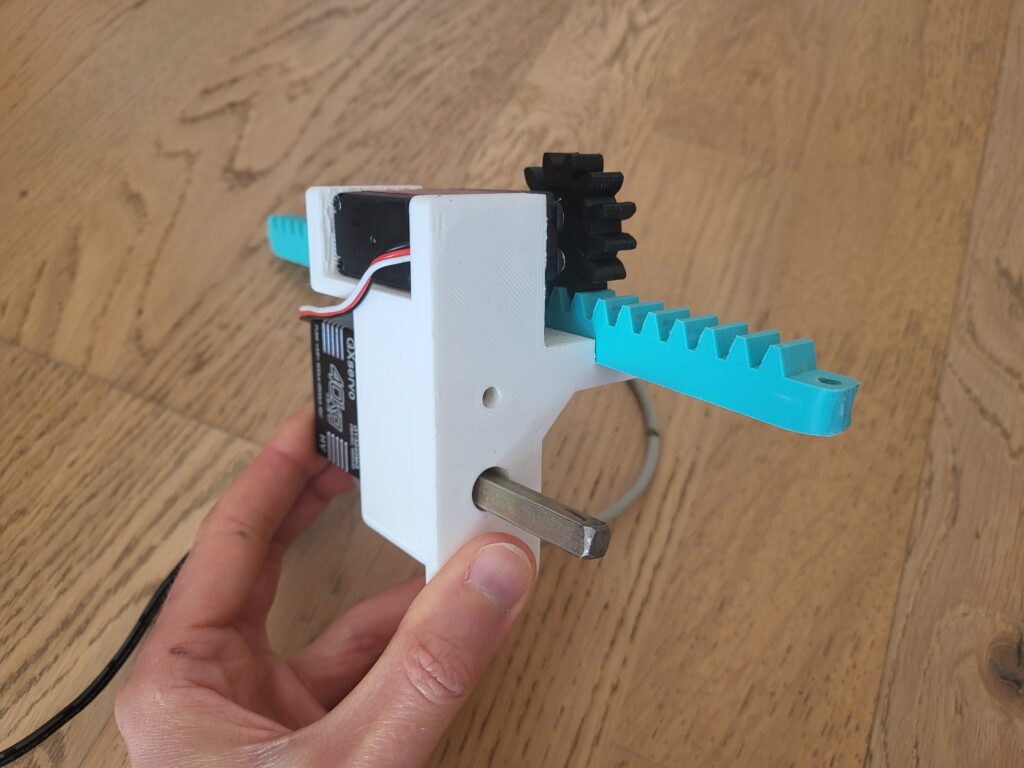
Finalement, j’opte pour un système à crémaillère, en ajoutant un second servo (à rotation continue, sinon la course n’est pas suffisante) qui engrène un pignon dessus :
Une cellule optique permet de détecter la présence du chat pour ne pas refermer la porte quand il est là :

Pour éviter d’avoir une alim qui traîne par terre, j’installe une prise secteur à la place du cache des connexions du volet roulant, juste au-dessus :

Cette fois, ça fonctionne plutôt bien !